
Disimulink hasilnya nanti sama halnya dengan M-file dimana sudah kita bahas pada postingan PENGENDALI PID (PID CONTROLLER) DENGAN MATLAB (M-FILE). hanya saja berbeda cara, benar kata pepatah banyak jalan menuju roma, Jadi sekarang terserah anda mau menggunakan fasilitas M-FILE pada matlab atau Simulink tapi yang penting mengerti kedua-duanya lebih bagus.
Contoh :
Suatu system control memiliki transfer fungsi / fungsi alih sebagai berikut :

Sekarang buka software matlab anda Buka Simulink dengan mengKlik tanda Simulink atau ketikkan simulink di command windows lalu enter > Setelah berhasil >File >New >Model.
- Setelah itu rangkailah gambar seperti dibawah ini
- Kemudian Save dan Start Simulation (Ctrl+T).

Hasilnya :
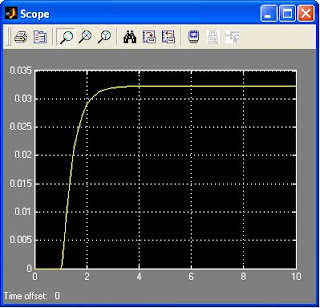
Gambar Respon Awal Sistem
Sekarang kita menggunakan pengendali P, PD, PI dan PID:
1. Kendali Proporsional
Rangkailah simulink seperti gambar berikut dimana sama seperti gambar diatas hanya saja nilai gainnya=100(Kp) :

Hasil Respon Sistemnya :

Gambar Respon Sistem dengan Kendali P
2. Kendali Proporsional dan Derivative
Rangkailah gambar di simulink seperti gambar berikut :
Kp=300 dan Kd=10

Hasil Respon Sistemnya :

Gambar Respon Sistem dengan Kendali PD
3. Kendali Proporsional dan Integral
Rangkailah gambar di simulink seperti gambar berikut :
Kp=40 dan Ki=100

Hasil Respon Sistemnya :

Gambar Respon Sistem dengan Kendali PI
4. Kendali Proporsional , Integral dan Derivative (PID) :
Rangkailah gambar di simulink seperti gambar berikut :
kp=350,ki=300 dan kd=50;
Hasil Respon Sistemnya :
